规格参数
| 型号 | Z1 |
|---|---|
| 自由度 | 6轴 |
| 自重 | 4.1kg |
| 负载 | 3-5kg |
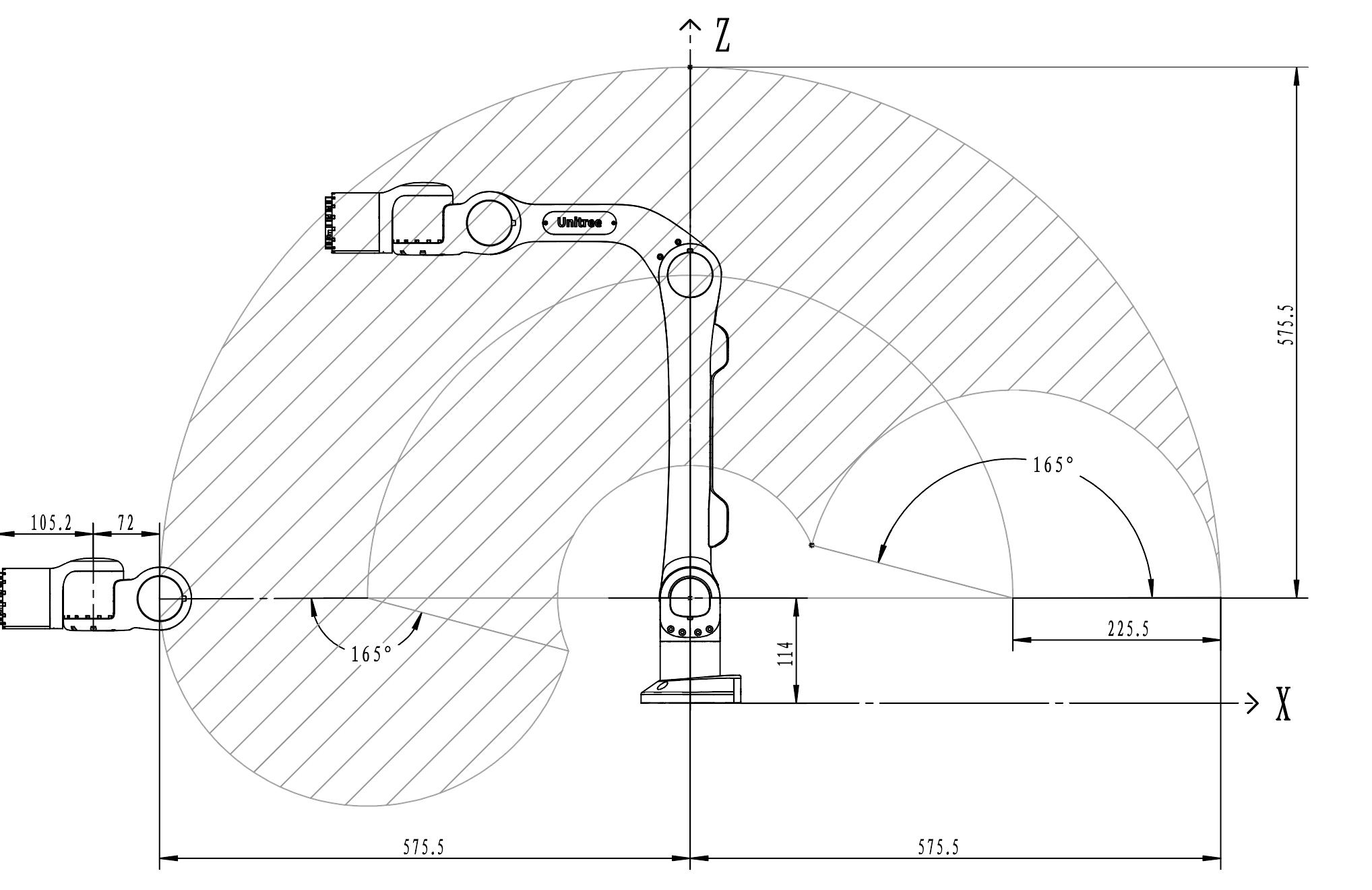
| 最大臂展 | 700mm |
| 重复定位精度 | ~0.1mm |
| 电源需求 | 电压24V 电流>20A |
| 接口 | Ethernet |
| 用户控制系统 | Ubuntu |
| 功率 | 峰值500W |
| 力反馈和碰撞检测 | 有 |
| 接口控制 | 位置+力控 |
机械臂运动范围
旋转方向及坐标系
关节坐标系
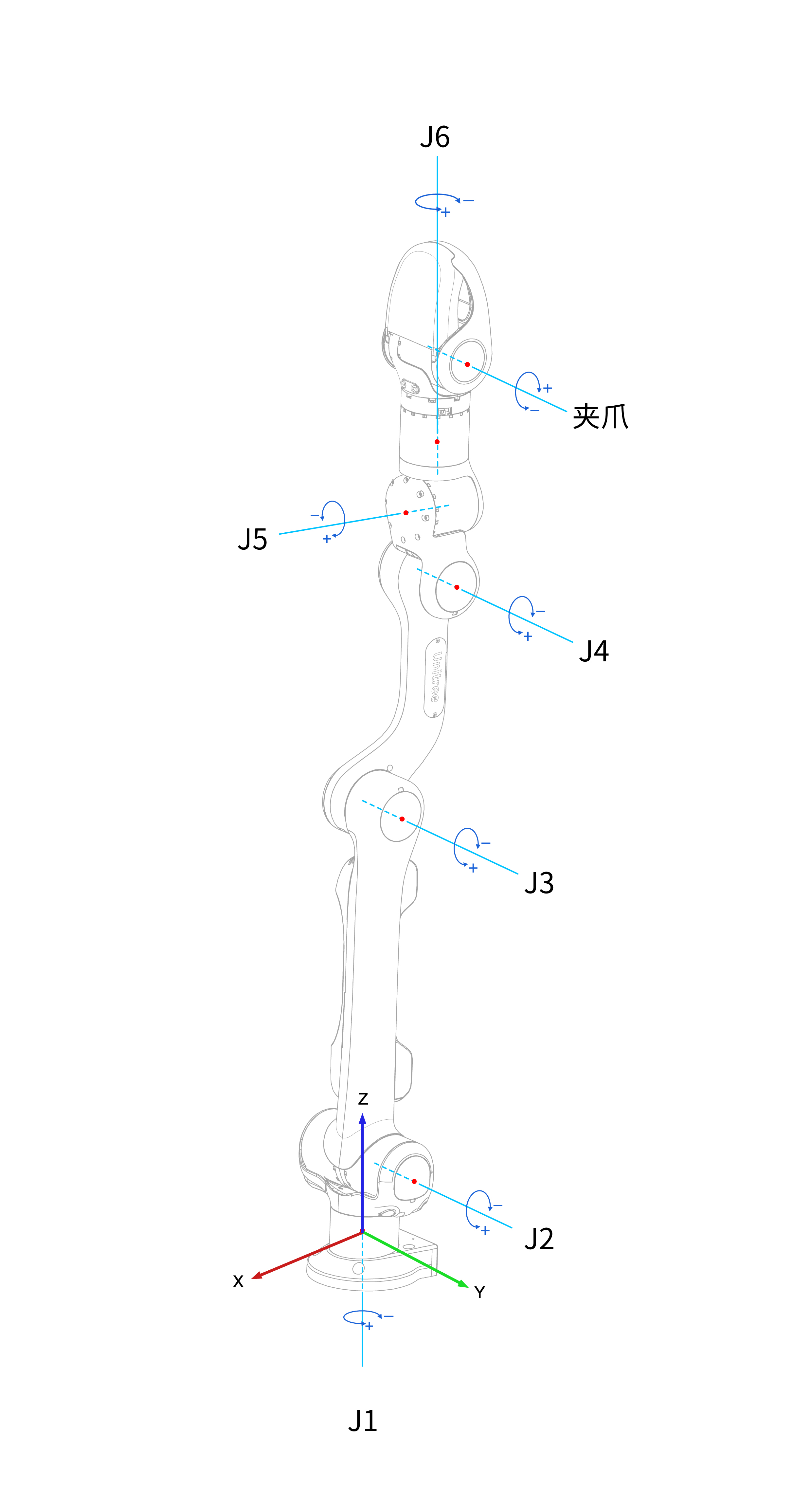
z1机械臂关节序号及关节转动正方向定义
各关节序号从J1开始,逐个递增至J6。在上图中+键表示关节转动的正方向,-键表示关节转动的负方向。
| 关节 | 各关节旋转法向 | 关节坐标 |
|---|---|---|
| J1 | [0, 0, 1] | [0, 0, 0.0665] |
| J2 | [0, 1, 0] | [0, 0, 0.114] |
| J3 | [0, 1, 0] | [-0.35, 0. 0.114] |
| J4 | [0, 1, 0] | [-0.132, 0, 0.1717] |
| J5 | [0, 0, 1] | [-0.06, 0, 0.1717] |
| J6 | [1, 0, 0] | [-0.0128, 0, 0.1717] |
笛卡尔坐标系
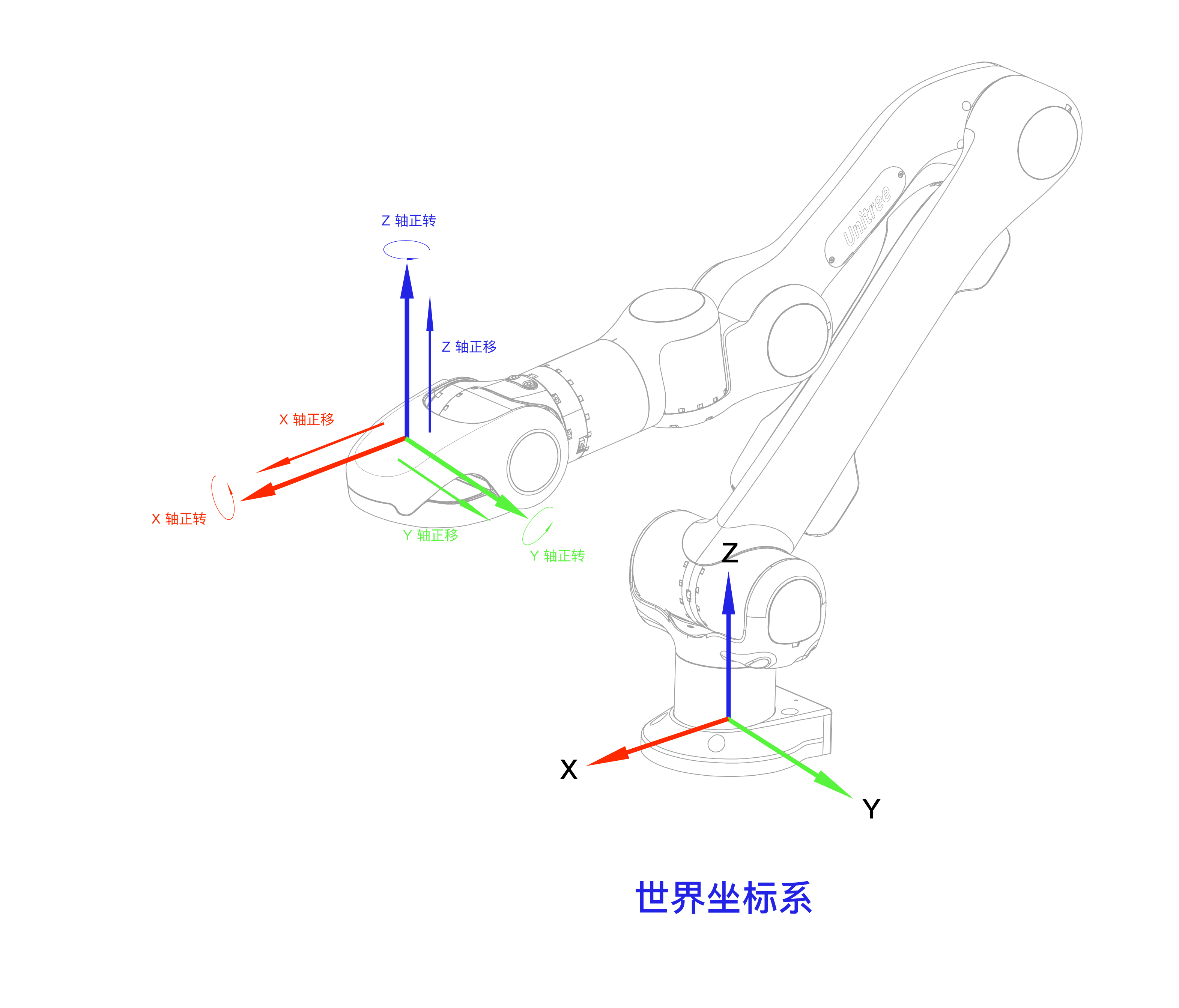
笛卡尔空间控制